Pipeline Parallelism
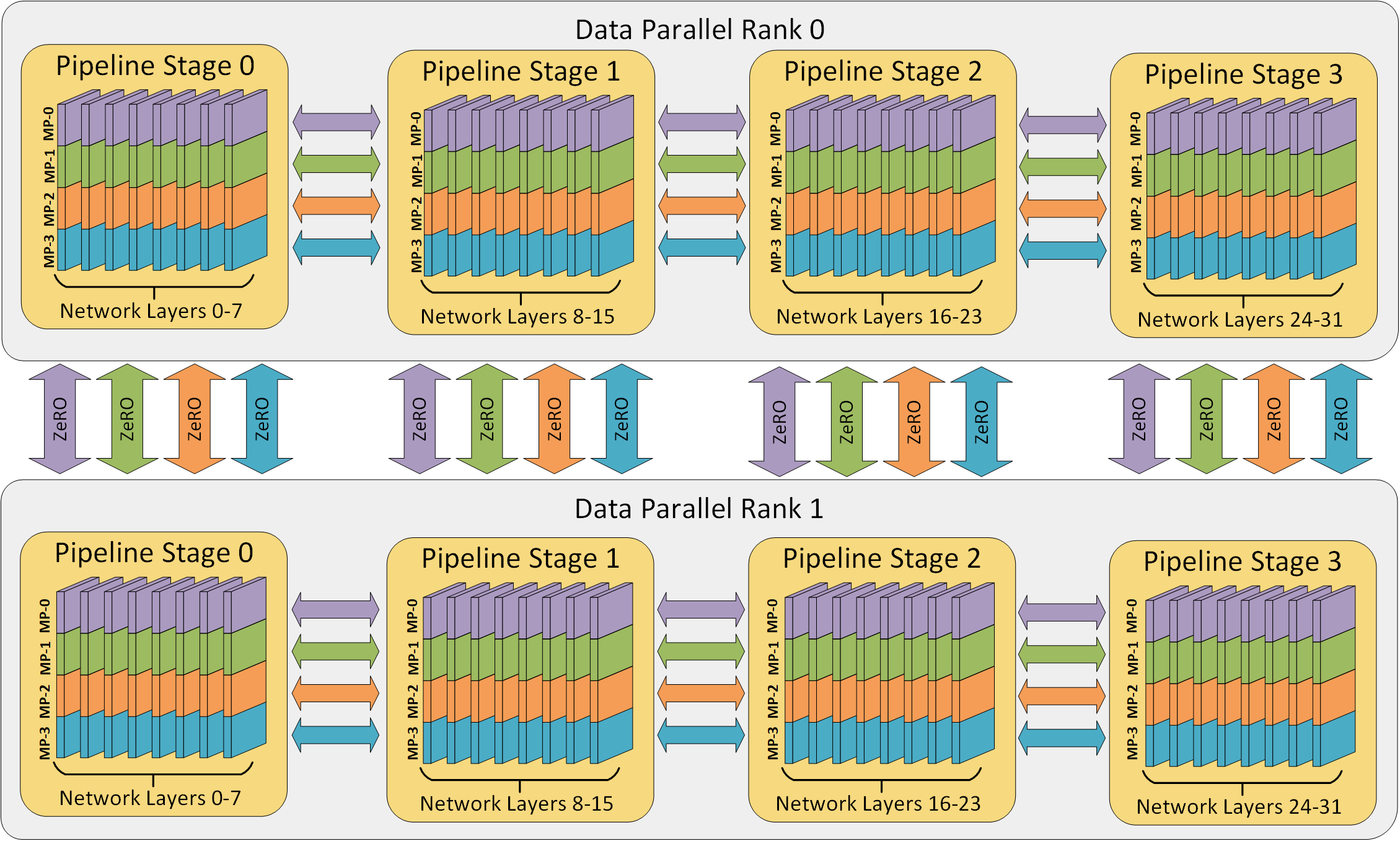
DeepSpeed v0.3 includes new support for pipeline parallelism! Pipeline parallelism improves both the memory and compute efficiency of deep learning training by partitioning the layers of a model into stages that can be processed in parallel. DeepSpeed’s training engine provides hybrid data and pipeline parallelism and can be further combined with model parallelism such as Megatron-LM. An illustration of 3D parallelism is shown below. Our latest results demonstrate that this 3D parallelism enables training models with over a trillion parameters.
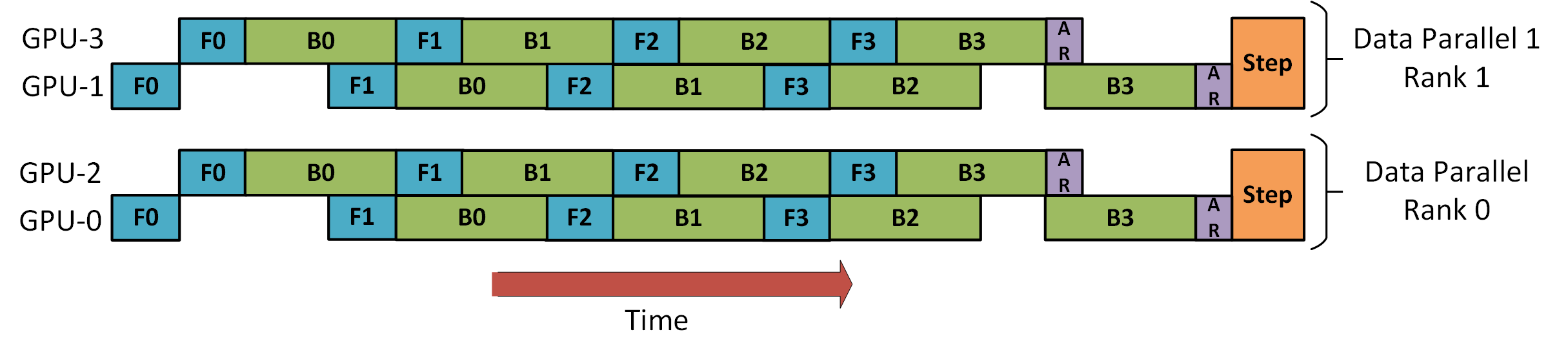
DeepSpeed uses gradient accumulation to extract pipeline parallelism (shown below). Each batch of training data is divided into micro-batches that can be processed in parallel by the pipeline stages. Once a stage completes the forward pass for a micro-batch, the activation memory is communicated to the next stage in the pipeline. Similarly, as the next stage completes its backward pass on a micro-batch, the gradient with respect to the activation is communicated backwards through the pipeline. Each backward pass accumulates gradients locally. Next, all data parallel groups perform reductions of the gradients in parallel. Lastly, the optimizer updates the model weights.
Below is an illustration of how DeepSpeed will train a batch with eight micro-batches using hybrid two-way data parallelism and two-stage pipeline parallelism. GPUs 0 and 2 are arranged in a pipeline and will alternate forward (F) and backward (B) passes. They will then all-reduce (AR) gradients with their data parallel counterparts, GPUs 1 and 3, respectively. Finally, the two pipeline stages update their model weights.
Getting Starting with Pipeline Parallelism
DeepSpeed strives to accelerate and simplify the process of pipeline
parallel training. This section provides first steps with hybrid data and
pipeline parallel training by preparing torchvision’s
AlexNet
model.
Expressing Pipeline Models
Pipeline parallelism requires models to be expressed as a sequence of layers.
In the forward pass, each layer consumes the output of the previous
layer. In fact, there is no need to specify a forward() for a pipeline
parallel model! The forward pass of a pipeline parallel model implicitly
takes the form:
def forward(self, inputs):
x = inputs
for layer in self.layers:
x = layer(x)
return x
PyTorch’s
torch.nn.Sequential
is a convenient container for expressing pipeline parallel models and can be
parallelized by DeepSpeed with no modification:
net = nn.Sequential(
nn.Linear(in_features, hidden_dim),
nn.ReLU(inplace=True),
nn.Linear(hidden_dim, out_features)
)
from deepspeed.pipe import PipelineModule
net = PipelineModule(layers=net, num_stages=2)
PipelineModule uses its layers argument as the sequence of layers that
comprise the model. After initialization, net is divided into two pipeline
stages and its layers moved to the corresponding GPUs. If more than two GPUs
are present, DeepSpeed will also use hybrid data parallelism.
Note: The total number of GPUs must be divisible by the number of pipeline stages.
Note: For large model training, see memory-efficient model construction.
AlexNet
Let’s look at an abbreviated implementation of torchvision’s
AlexNet:
class AlexNet(nn.Module):
def __init__(self, num_classes=1000):
super(AlexNet, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=11, stride=4, padding=2),
...
nn.MaxPool2d(kernel_size=3, stride=2),
)
self.avgpool = nn.AdaptiveAvgPool2d((6, 6))
self.classifier = nn.Sequential(
nn.Dropout(),
...
nn.Linear(4096, num_classes),
)
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
AlexNet is mostly a composition of several Sequential submodules. We can
turn this into a PipelineModule by flattening its submodules into a single
sequence of layers:
class AlexNetPipe(AlexNet):
def to_layers(self):
layers = [
*self.features,
self.avgpool,
lambda x: torch.flatten(x, 1),
*self.classifier
]
return layers
from deepspeed.pipe import PipelineModule
net = AlexNetPipe()
net = PipelineModule(layers=net.to_layers(), num_stages=2)
Note:
the lambda in the middle of layers above is not a torch.nn.Module
type. Any object that implements __call__() can be a layer in a
PipelineModule: this allows for convenient data transformations in the
pipeline.
Inputs and Outputs
Following torch.nn.Sequential, the inputs and outputs of each layer must be
either a single torch.Tensor or a tuple of tensors. In practice, some
models may need to modify their forward pass to pack and unpack arguments to
forward(). Consider an abbreviated implementation of a stack of Transformer
blocks:
class TransformerBlock(nn.Module)
...
def forward(self, hidden, mask):
output = self.compute(hidden, mask)
return output
...
stack = [ TransformerBlock() for _ in range(num_layers) ]
Two modifications to TransformerBlock are required:
- The arguments must be collected into a
tuple. maskmust also be returned fromforward()to pass to the next layer.
These modifications can be accomplished with a short subclass:
class TransformerBlockPipe(TransformerBlock)
def forward(self, inputs):
hidden, mask = inputs
output = super().forward(hidden, mask)
return (output, mask)
stack = [ TransformerBlockPipe() for _ in range(num_layers) ]
Training Loops
Pipeline parallelism interleaves forward and backward passes, and thus the
training loop cannot be divided into separate stages of forward(),
backward() and step().
Instead, DeepSpeed’s pipeline engine provides a train_batch() method that
advances the pipeline engine until the next batch of training data is
consumed and the model weights updated.
train_iter = iter(train_loader)
loss = engine.train_batch(data_iter=train_iter)
The above train_batch() example is equivalent to the following with
traditional data parallel DeepSpeed:
train_iter = iter(train_loader)
for micro_batch in engine.gradient_accumulation_steps():
batch = next(data_iter)
loss = engine(batch)
engine.backward(loss)
engine.step()
Dealing with Data
Data parallel training typically has each worker perform IO independently at the start of each batch. However, in a pipeline parallel environment, only the first stage uses the input data, and only the last stage uses labels for loss calculation.
Note:
The pipeline engine expects data loaders to return a tuple of two items. The
first returned item is the input batch data, and the second item is the data
to be used in the loss calculation. As before, inputs and labels should be
either torch.Tensor type or a tuple of tensors.
For convenience, the DeepSpeed pipeline engine can construct a distributed
data loader when a dataset is provided to deepspeed.initialize(). DeepSpeed
handles the rest of the complexity of data loading, and so the pipeline
training loop becomes:
engine, _, _, _ = deepspeed.initialize(
args=args,
model=net,
model_parameters=[p for p in net.parameters() if p.requires_grad],
training_data=cifar_trainset())
for step in range(args.steps):
loss = engine.train_batch()
Of course, DeepSpeed will work with any data loader that you wish to use.
Data loaders should be constructed by the first and last stages in the
pipeline. Each worker should load micro-batches of size
engine.train_micro_batch_size_per_gpu() and will be queried
a total of engine.gradient_accumulation_steps() times per train_batch().
Watch out!
The pipeline engine pulls data from an iterator instead of iterating over
it. It’s critical that the data stream does not empty in the middle of a
training batch. Each invocation of train_batch() will pull
a total of engine.gradient_accumulation_steps() micro-batches of data from
the data iterator.
DeepSpeed provides a convenience class deepspeed.utils.RepeatingLoader that
simply wraps an iterable such as a data loader and restarts it whenever the
end is reached:
train_loader = deepspeed.utils.RepeatingLoader(train_loader)
train_iter = iter(train_loader)
for step in range(args.steps):
loss = engine.train_batch(data_iter=train_iter)
Advanced Topics
Load Balancing Pipeline Modules
The performance of pipeline parallel training strongly relies on load
balance. DeepSpeed provides several mechanisms for partitioning the model
across GPUs. These strategies can be set with the partition_method keyword
argument to PipelineModule. Here are partitioning methods currently provided
by DeepSpeed:
partition_method="parameters"(default) balances the number of trainable parameters on each pipeline stage . This is especially useful in memory-constrained environments and when the size of a layer is proportional to the computation time.partition_method="type:[regex]"balances layers whose class names match[regex]. The regular expression is not case sensitive. For example,partition_method="type:transformer"would balance the number of transformer layers per stage.partition_method="uniform"balances the number of layers per stage.
Memory-Efficient Model Construction
Building a Sequential container and providing it to a PipelineModule is a convenient way
of specifying a pipeline parallel model. However, this approach encounters scalability issues
for massive models because each worker replicates the whole model in CPU memory.
For example, a machine with 16 GPUs must have as much local CPU memory as 16 times the model size.
DeepSpeed provides a LayerSpec class that delays the construction of
modules until the model layers have been partitioned across workers.
Then each worker will allocate only the layers it’s assigned to. So, comparing to the
example from the previous paragraph, using LayerSpec a machine with 16 GPUs will need to
allocate a total of 1x model size on its CPU memory and not 16x.
Here is an example of the abbreviated AlexNet model, but expressed only
with LayerSpecs. Note that the syntax is almost unchanged: nn.ReLU(inplace=True)
simply becomes LayerSpec(nn.ReLU, inplace=True).
from deepspeed.pipe import PipelineModule, LayerSpec
class AlexNetPipe(PipelineModule):
def __init__(self, num_classes=10, **kwargs):
self.num_classes = num_classes
specs = [
LayerSpec(nn.Conv2d, 3, 64, kernel_size=11, stride=4, padding=2),
LayerSpec(nn.ReLU, inplace=True),
...
LayerSpec(nn.ReLU, inplace=True),
LayerSpec(nn.Linear, 4096, self.num_classes),
]
super().__init__(layers=specs, loss_fn=nn.CrossEntropyLoss(), **kwargs)
Tied Layers
Some models cannot be entirely expressed as pipeline parallel models because some layers are reused in the pipeline. For example, Transformer based language models commonly use an embedding layer early in the pipeline to map vocabulary to hidden states, and then use the embedding to map hidden states back to vocabulary at the end of the pipeline. If the model was restricted to pure pipeline parallelism, this embedding reuse would prohibit pipeline parallelism.
DeepSpeed provides a TiedLayerSpec that is an extension of
LayerSpec. TiedLayerSpec requires an additional argument: key.
Each reuse of a layer is specified with a TiedLayerSpec, and the key field
is used to identify where a layer is reused.
Tied layers are replicated on every pipeline stage that owns an instance of reuse. Training then proceeds as normal, but an additional all-reduce of the tied gradients is added after all backward passes complete. The all-reduce ensures that the weights of the tied layer remain in sync across pipeline stages.